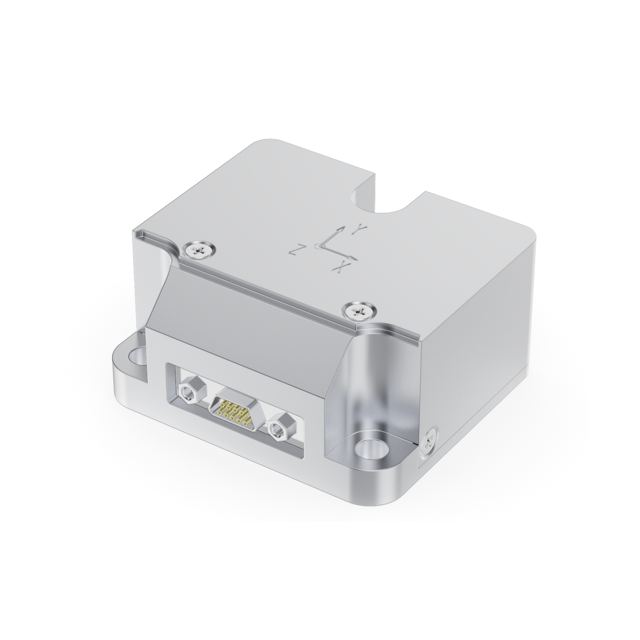
The M-07 MEMS inertial measurement unit (IMU) can measure and output in real-time the angular velocity and linear acceleration of a carrier along three axes: roll, pitch, and yaw. This IMU model is characterized by its small size, low power consumption, light weight, and high reliability, making it suitable for various application fields.
Specifications
| Performance Indicators | Notes | ||
| Triaxial Gyroscope | Measurement Range | ±2000°/s | |
| Scale Factor Nonlinearity | 200ppm | ||
| Misalignment Angle | ≤5′ | ||
| Zero Bias (Full Temperature) | ≤±0.15°/s | Full Temperature | |
| Zero Bias Stability | ≤10°/h | (1σ, 10s smoothing) Full Temperature | |
| Zero Bias Repeatability | ≤5°/h | (1σ, 10s smoothing) Full Temperature | |
| Bandwidth (-3dB) | >200 Hz | ||
| Triaxial Accelerometer | Measurement Range | ±50g | |
| Misalignment Angle | ≤5′ | ||
| Zero Bias (Full Temperature) | ≤1mg | Full Temperature | |
| Zero Bias Stability | ≤3mg | Full Temperature | |
| Zero Bias Repeatability | ≤1mg | Full Temperature | |
| Bandwidth (-3dB) | >200 Hz | ||
| Interface Characteristics | |||
| Interface Type | RS-422 | Baud Rate | 460800bps (Customizable) |
| Data Format | 8 data bits, 1 start bit, 1 stop bit, no parity | ||
| Data Update Rate | 400Hz (configurable) | ||
| Environmental Adaptability | |||
| Operating Temperature Range | -40℃~+70℃ | ||
| Storage Temperature Range | -45℃~+80℃ | ||
| Vibration (g) | 10gms,20Hz~2000Hz | ||
| Electrical Characteristics | |
| Input Voltage (VDC) | +5V |
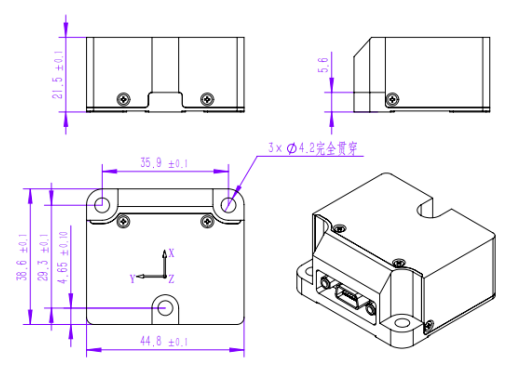
| Physical Characteristics | |||
| Dimensions (mm) | (44.8±0.1)×(38.6±0.1)×(21.5±0.1)mm | ||
| Weight (g) | ≤60g | ||
Applications
- Servo control
- Stabilization platforms
- Integrated navigation
Diagram