The MEMS-13 MEMS Combined INS utilizes a MEMS inertial measurement unit (IMU) and an external (internal) GPS/ BDS positioning module in a combined navigation system. It is capable of measuring the attitude, heading, speed, and position of the carrier, characterized by its compact size and high precision. The MEMS Combined INS system internally integrates various sensors such as gyroscopes, accelerometers, magnetic compasses, temperature sensors, etc., and employs a high-performance, small-sized microcontroller unit (MCU). It features adaptive wide-range power supply input and can interface with external auxiliary information such as an odometer.
Features
- Strong Anti-interference Capability: The system can output stable and reliable magnetic heading information. Even when the satellite signal is lost, it can still output reliable navigation data for a period of time (not more than 3 minutes).
- Superior Performance Indicators: The horizontal attitude measurement accuracy is 0.05° (RMS), and the azimuth accuracy is better than 0.2°.
- Large Operating Range: Utilizing silicon micro-MEMS devices, it has strong resistance to vibration and impact.
- Wide Application Range: It can use an internal GPS/BD2/GLONASS triple-mode satellite navigation module or an external GPS/BD2/GLONASS triple-mode satellite navigation module with higher precision. It has high tracking sensitivity, suitable for positioning and navigation in open areas, and also applicable to complex environments such as streets and jungles.
- Good User Experience: System parameters can be set through an upper computer, with adjustable output bandwidth and protocol, supporting online program upload and parameter configuration.
Specifications
| Performance Indicator | Remarks | |
| Pitch Angle Measurement Range | -90° to +90° | |
| Roll Angle Measurement Range | -180° to +180° | |
| Heading Angle Measurement Range | 0 to 360° | |
| Horizontal Attitude Accuracy | <0.05° (RMS) | under good satellite signal conditions |
| Heading Angle Accuracy | <0.2° | under good satellite signal conditions |
| Horizontal Attitude Maintenance Accuracy | <5°/h (10 minutes) | in pure inertial navigation |
| Heading Angle Maintenance Accuracy | <5°/h (10 minutes) | in pure inertial navigation |
| Velocity Accuracy | 0.03 (1σ) | |
| Position Accuracy | 1.5 (1σ) | |
| Altitude Accuracy | 3 (1σ) | |
| Operating Temperature | -50°C to +70°C | |
The input/output connector model for the MEMS combined inertial navigation system is the shielded J30J-15ZKP.
| Pin | Name | Name | Pin | Name | Name |
| 1 | VCC | Power supply (9-28V) | 9 | GND | Communication ground |
| 2 | VCC | Power supply (9-28V) | 10 | GND | Communication ground |
| 3 | GND | Power supply ground | 11 | GND | Communication ground |
| 4 | GND | Power supply ground | 12 | RX1+ | RS4221 reception+ |
| 5 | RX2+ | RS4222 reception+ | 13 | RX1- | RS4221 reception – |
| 6 | RX2- | RS4222 reception- | 14 | TX1+ | RS4221 sending + |
| 7 | TX2+ | RS4222 sending + | 15 | TX1- | RS4221 sending – |
| 8 | TX2- | RS4222 sending – |
The interface for the MEMS combined inertial navigation system is RS422, with a baud rate of 921600bps; Data format: 1 start bit, 8 data bits, no parity bit, 1 stop bit; Data transmission period is 5ms, transmission method is blind transmission; Bytes are transmitted with the high byte followed by the low byte, negative numbers are represented in two’s complement; The product is multiplied by a scale factor when sent.
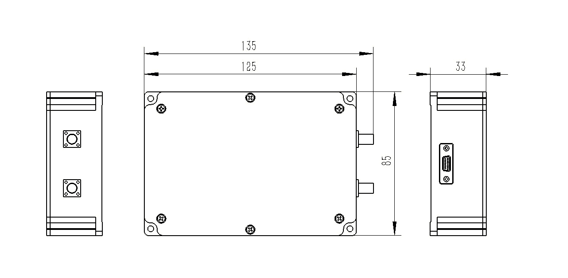
Diagram