F-06 Optical Fiber Combined Navigation System
Specifications
| Indicators | Performance | Notes |
Gyroscope Performance |
||
| Gyroscope zero bias stability | ≤0.1°/h | 1σ, full temperature range |
| Gyroscope zero bias repeatability | ≤0.1°/h | 1σ, full temperature range |
| Angular rate range | -500°/s to +500°/s | |
| Angle random walk | ≤0.01°/h<sup>1/2</sup> | 1σ, full temperature range |
| Scale factor nonlinearity | ≤100ppm | |
| Scale factor repeatability | ≤100ppm | |
| Measurement bandwidth | 300Hz | phase lag ≤45°, amplitude attenuation ≤-3dB |
| Startup time | ≤10s | |
Accelerometer Performance |
||
| Accelerometer zero bias stability | ≤50ug | 1σ, full temperature range |
| Accelerometer zero bias repeatability | ≤50ug | 1σ, full temperature range |
| Measurement range | -25g to 25g | |
| Measurement bandwidth | 500Hz | phase lag ≤45°, amplitude attenuation ≤-3dB |
| Self-inspection time | ≤10s | |
Alignment Method and Time |
||
| Alignment method | Transfer alignment (using primary inertial or satellite navigation information) Ground self-alignment |
|
| Transfer alignment time | ≤3min | |
| Ground self-alignment time | ≤5min | |
Transfer Alignment Accuracy |
||
| Heading angle | ≤0.05° | 1σ |
| Pitch angle | ≤0.02° | 1σ |
| Roll angle | ≤0.02° | 1σ, Ground self-alignment |
| Heading angle | ≤0.3° | 1σ |
| Pitch angle | ≤0.02° | 1σ |
| Roll angle | ≤0.02° | 1σ |
Navigation Information Update Rate |
||
| Navigation information update rate | 200Hz | configurable |
Measurement Range |
||
| Pitch angle measurement range | -89.5° to +89.5° | |
| Roll angle measurement range | -180° to +180° | |
| Heading angle measurement range | 0° to 360° | |
Dynamic Combined Navigation Accuracy (During transfer alignment with maneuvering) |
||
| Pitch angle | ≤0.02° | 1σ |
| Roll angle | ≤0.02° | 1σ |
| Heading angle | ≤0.05° | 1σ |
| Horizontal position accuracy | ≤5m | 1σ |
| Height accuracy | ≤10m | 1σ |
| Horizontal speed accuracy | ≤0.1m/s | 1σ |
| Vertical speed accuracy | ≤0.1m/s | 1σ |
Combined Navigation to Pure Inertial Navigation Accuracy |
||
| Pitch angle | ≤0.1° | within 20min |
| Roll angle | ≤0.1° | within 20min |
| Heading angle | ≤0.1° | within 20min |
| Horizontal positioning hold accuracy | ≤2 nautical miles/20min | CEP50 |
Physical and Environmental Requirements |
||
| Operating temperature | -40°C to +60°C | |
| Storage temperature | -50°C to +70°C | |
| Operating Voltage | DC18V to 36V | ripple ≤200mV |
| Maximum instantaneous power consumption at startup | <40W | |
| Stable power consumption | <20W | |
| Startup current | <1.5A | |
| Steady-state current | <0.6A | |
| Pulse Waveform | Acceleration Peak | Duration | Velocity Change | Time Between Successive Shocks ms | Shock Direction | Number of Shocks |
| Rear peak sawtooth wave | 20 g | 11 ms | 1.10 m/s | ≥55 ms | Three axes, six directions | 3 times per direction |
Composition
The F-06 optical fiber combined navigation system consists of three parts: the fiber optic inertial measurement unit (IMU), the secondary power board, and the navigation computer.
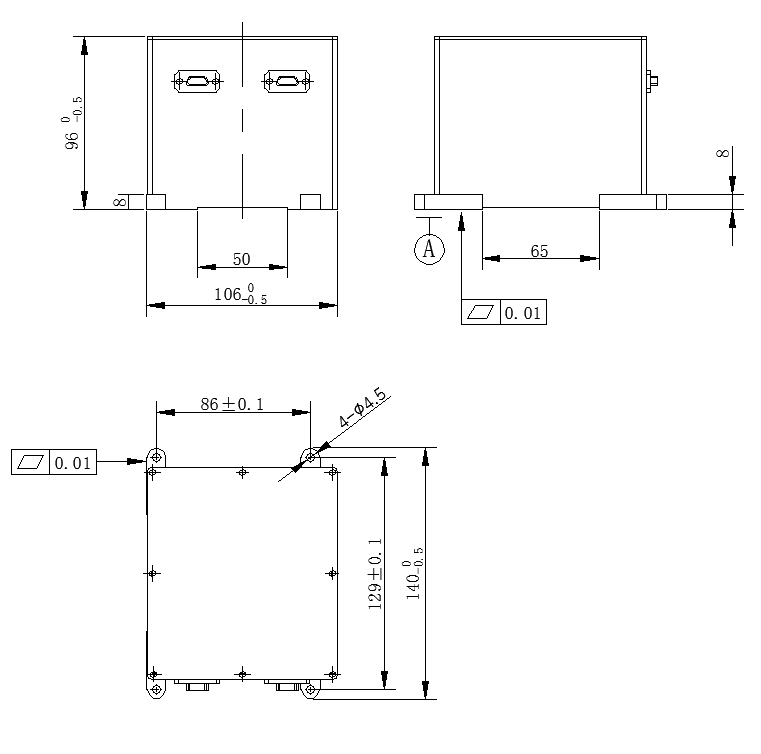
Diagram