The north finder is mainly used to quickly and autonomously determine the true north direction. Specifically, the system first obtains the Earth’s rotational angular velocity through high-precision fiber optic gyroscope tracking, and then decomposes and calculates the angular velocity signal to determine the angle between the gyroscope spindle and the true north direction of the Earth, thereby providing directional information for the carrier. In addition, as an electromechanical integrated product, the device mainly consists of fiber optic gyroscope, accelerometer, mechanical rotation control device, and embedded computer. In short, it achieves efficient and accurate directional functions by integrating multiple sets of sensors and computing units.
Specifications
| Items | Indicators |
| Power supply | 23.2V~30.8V |
| Average power consumption | ≤20W, Peak power consumption ≤ 30W |
| Working method | Static |
| Range of inclination measurement | 士8 ° |
| Tilt measurement accuracy | 士0.02 ° |
| Tilt resolution | 0.01° |
| Range of azimuth measurement | 0~360° |
| Azimuth measurement accuracy | 0.06 °/0.03 ° (1 σ) (high precision) 0.12 ° (10) (medium precision) 0.2 ° (1o) (Low precision) |
| Azimuth resolution | 0.01° |
| interface form | RS-232 or RS-422 |
| Data update rate | 1Hz |
| Single North Search Time | 3min |
| Warm-up time | 5min |
| Operating Temperature | -40℃~60℃ |
| Storage temperature | -45℃~65℃ |
| Vibration | Vertical installation towards 3g, random vibration, action time 5min |
| Impact | Half sine wave, vertical direction 30g, 10ms |
Applications
- Antenna orientation
- Vehicle orientation
- Radar orientation
- Underground space orientation
- Earthquake monitoring system
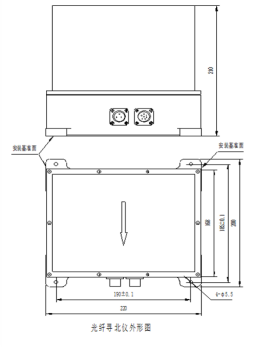
Drawing